Hexapod Grip Arm
Contents
- 1 What is the Hexapod Grip Arm?
- 2 What are the Capabilities of the Grip Arm?
- 3 Photo Gallery
- 4 Controlling The Grip Arm
- 5 Assembly Instructions
- 6 License
What is the Hexapod Grip Arm?
The Hexapod Grip Arm is an open source 3D printed project that provides an arm with a claw end-effector. It's designed for [Vorpal The Hexapod] and will plug right into the accessory port for that project. It could easily be used with other robotics projects as well.
What are the Capabilities of the Grip Arm?
The Grip Arm can:
- Raise and lower the claw end-effector. When attached to Vorpal The Hexapod, the claw can be lowered almost to ground level (about 2.5 centimeters or 1 inch) or it can be raised to about the top of the robot's cap.
- Open and close the claw. The claw can grasp objects up to about 5 centimeters (2 inches) in diameter.
- The Grip Arm can safely lift objects of up to about 120 grams (4.5 ounces).
- The Grip Arm is designed so that the claw remains approximately level as it raises and lowers.
The Grip Arm is intended to be used with Vorpal The Hexapod for activities and games, not to lift heavy objects.
Photo Gallery
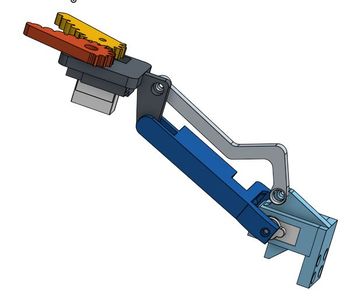
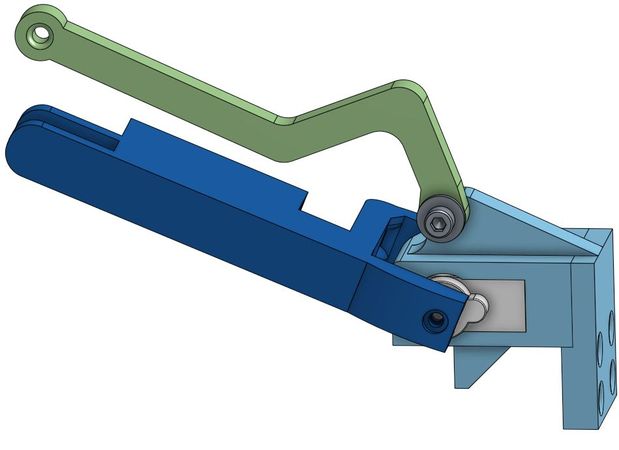
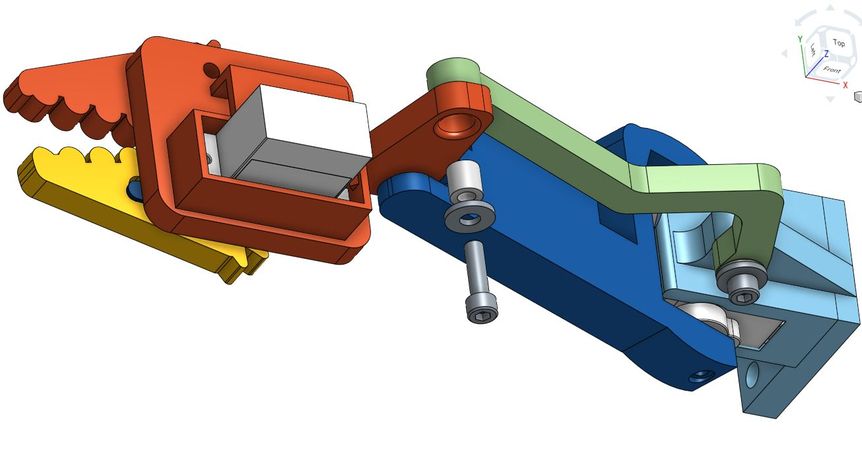
This diagram shows the Grip Arm built with the claws in the upper position.

Controlling The Grip Arm
Assuming you have the Grip Arm assembled and installed along with the latest version of robot firmware, you may control it using the gamepad it as follows:
- Turn the robot dial to "RC". Now, turn it slowly counterclockwise until you hear one beep. Go a bit farther, then stop turning. You are now in radio control mode but the Grip Arm controls replace the usual F2 fight mode controls.
- Click on F2 on the gamepad. The DPAD will now control the Grip Arm according to the diagram below.
The Grip Arm will retain its position even when you switch to other modes. For example, you can open the claw, raise the arm, then hit W1 to walk. The arm will remain in its last position until you go back into F2 mode and change it.
As you hold DPAD buttons, the arm will move at modest speed, allowing you to stop where you need it to be.
NOTE: The robot goes into sleep mode when it's in any walking (W) mode after five seconds of inactivity. The Grip Arm servos will also go to sleep in this case. Clicking any DPAD button will wake up all the servos and they'll return to their prior positions.

Assembly Instructions
Bill of Materials (BOM)
A complete kit is available from The Vorpal Robotics Store
BOM:
- 1 x Tower Pro MG90S servo. Used to lift the arm, metal gear servo required. The Vorpal Brand MG90 Servo is optimized for this kind of project.
- 1 x Tower Pro SG90 servo. This is a plastic gear servo used to open and close the claw. Our kits contain a spare as well.
- 2 x servo extension wires (M-F) 20cm length or longer.
- 4 x nylon spacers 1/4" long, 1/4" outer diameter with center hole for #6 screw. These are used as bearings for moving parts.
- 3 x #6-32 by 1/2" long button head socket screws with #6 washers.
- 1 x 2.5mm x 8mm socket head cap screws for mounting MG90 servo horn (you will not use the screws that come with the MG90 servo, they're not long enough). Note that the SG90 servo horn will be mounted using the pointy screws that come with the SG90 servo.
3D Printed Parts
- See Thingiverse for STL files to 3D print the Grip Arm parts here: GRIP ARM STL FILES ON THINGIVERSE
Tools You Will Need
- 2mm hex driver (included with kit)
- Small Phillips head (crosshead) screwdriver. This was not included with kits shipped before December 1, 2018 but is included after that date.
STEP 1: Flashing The Robot Control Program
To control the Grip Arm using your gamepad, you will need the right version of the robot code. This code needs to be installed before you start to build the Grip Arm, because you'll need it to adjust the servos and install the servo horns in the right orientation.
If you bought a robot kit from Vorpal Robotics after December 1, 2018, then your robot already has the new version of code that supports the Grip Arm and you can skip this section.
If you bought from us before December 1, 2018, then you need to follow instructions to flash the new robot code. The instructions to do this are here: Flashing the Robot Code.
STEP 2: Adding Servo Extension Cables to the Robot's Servo Driver
Take the cap off the robot and remove the screws holding the electronics caddy in place.
Carefully lift the electronics caddy and locate the Servo Driver board. (It's the large electronics module in the center of the caddy, the one that all the servo wires plug into.)
There are two servo extension wires in the kit. One of them is labelled SD12 on one end and ELBOW on the other end. The other is labelled SD13 on one end and CLAW on the other end.
Carefully wiggle the Servo Driver out of the electronics caddy. Disconnect any long, 20cm jumper wires in ports 12 through 15. The Grip-Arm servo extension wires will be replacing those. Move the Buzzer power wires to port 14 and move the BEC power output wires to port 15 (if they're not already there).
At this point ports 12 and 13 should now be clear of any wires. Plug the end of the servo extension labelled SD12 into Servo Driver port 12, and plug the wire end labelled SD13 into Servo Driver port 13. Be sure the white wire on the extension cable matches the yellow pin on the servo driver, and the black and red wires match up to the black and red pins.
Do not disturb any of the hexapod leg or hip servo connections which are in ports 0 through 11, and do not disturb the SDA/SCL connections on the end of the Servo Driver. The diagram below illustrates these connections.

Carefully insert the Servo Driver back into its spot in the electronics caddy.
Route the other ends of the two servo extensions you just installed to the accessory port such that the ends labelled CLAW and ELBOW are sticking out of the port.
Place the electronics caddy back on top of the robot. Do not screw it in yet, just in case you accidentally unplugged something. Later after testing you'll screw down the caddy again.
STEP 3: Test the Grip Arm Servos
Now we're going to plug the Grip Arm servos into the extension wires and orient the servo horns properly.
Start with the robot turned off.
Plug the Vorpal Brand MG90 servo into the servo extension marked ELBOW. Make sure the BLACK/RED/WHITE wires on the extension cable match the BROWN/RED/YELLOW wires on the servo.
Similarly, plug the SG90 servo (blue housing) into the servo extension marked CLAW. Again, make sure the wire colors match, the lightest colored wire on the servo should match the white wire on the extension cable.
NOTE 1: It is very important not to mix up the two types of servo. The SG90 is a plastic gear servo and it's being used on the claw because the claw needs to be as lightweight as possible, plus the claw does not bear anywhere near as heavy a load as the elbow does (the elbow servo must lift the entire arm plus whatever it is grabbing!)
NOTE 2: There is a spare SG90 servo in your kit. Plastic gear servos will break if over-used. Don't try to lift heavy objects, and don't clamp too tightly on objects that are larger than about half an inch wide.
Now, insert fresh batteries in the robot. Turn the dial to STOP mode, then turn the robot power switch ON.
After beeping a couple of times the robot should come to a standing position. You should also see the two Grip Arm servos twitch.
The software puts both Grip Arm servos in a 90 degree position during STAND mode. Remove the single-arm servo horns from the servo packages. (Don't mix up the two different kinds of horn, the white horn goes on the SG90 and the black horn goes on the Vorpal MG90).
Insert both horns so that they stick straight out from the servo, as closely as you can. Because there are a limited number of spines (grooves) on the servo horns, you may not be able to get it 100% exact, but do the best you can. The illustration below shows the ideal placement.

Now let's test the servos. Turn the robot off. Carefully and slowly move the horns on the two Grip Arm servos away from the 90 degree position (do not remove the horns! Turn them a little by hand).
Now turn the robot back on. (It's still in STAND mode.) Do the two Grip Arm servos move back to the 90 degree position you put them in before? Or does one or the other (or both) not turn?
If one or both Grip Arm servos fail to move back to the 90 degree position, carefully press on the servo horn to see if the servo appears to be under power or not. If it moves freely without resisting you, it has no power. Here are some possible causes:
- You may have inserted the servo wires into the extension backwards (not matching up colors the right way). Or, the servo extension cables themselves may not be plugged into the Servo Driver module properly (again, with colors not matched up). Check your wiring.
- It's also possible you did not upgrade your robot firmware to the proper version. You can check this by plugging the robot nano into your computer and using the Serial Monitor of the Arduino IDE to see what version of firmware is on your robot. This will printed out to the serial monitor when you bring the monitor up. The version printed should be: #RV1r9a (or later). That's Robot Version 1, Revision 9a.
- Rarely, there could be a defect in the servo that stops it from working. Contact customer support at support@vorpalrobotics.com
Build The Grip Arm
Okay, if you've gotten this far, all the software upgrading and electrical work is done. Now we just need to put together all the mechanical parts, which doesn't take very long!
A Note on Assembling the Joints
Here's a general concept we'll use several times in the build. This design uses several simple bearings made from a small nylon tube, a screw, and a washer. Nylon has good self-lubricating characteristics and these bearings will allow the arm to move freely, plus this design is compact and inexpensive. In each place that has this kind of bearing, there will be two moving parts that make up a joint, and one of the parts will have a larger hole (7mm or a bit over 1/4 inch) for the nylon tube, and another will have a smaller hole for the screw. The screw will have a washer on it so it doesn't pull through the big hole, and it will go through the nylon tube and then the screw will self-thread into the smaller hole. This is illustrated below.

The spacing is such that even if you fully tighten the screw, the joint can still move (i.e. the nylon part is slightly longer than the depth of the hole it goes in so there's always a bit of play).
Do not overtighten the screws! When they're all the way in, stop turning. Otherwise, you'll strip the plastic that they're self-threading into.
Inserting the Servos
Insert the servos as shown in the following set of illustrations. The blue SG90 plastic gear servo with white horn goes in the CLAW structure, the Vorpal brand MG90 with black horn goes in the ELBOW structure.
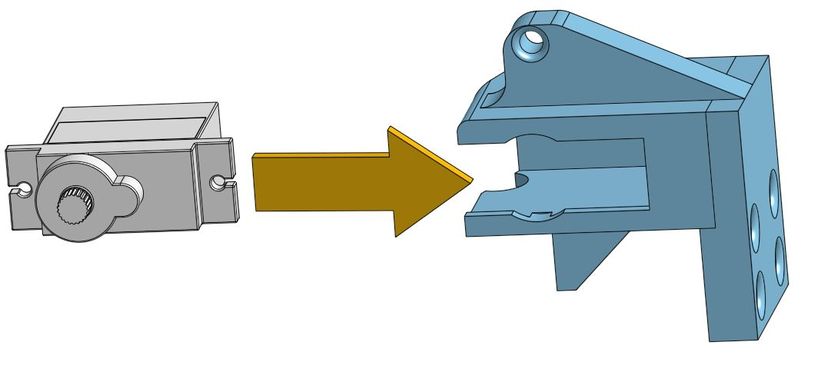
Insert the Vorpal MG90 into the Grip Base part as shown. It should click into place and will be retained by a little nub of plastic.
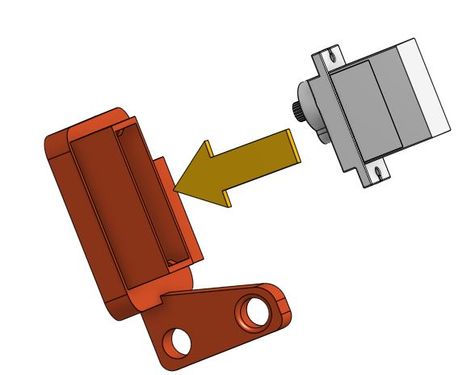
Insert the Tower Pro SG90 servo into the Claw Mount part as shown. It should click into place and will be retained by a little nub of plastic.


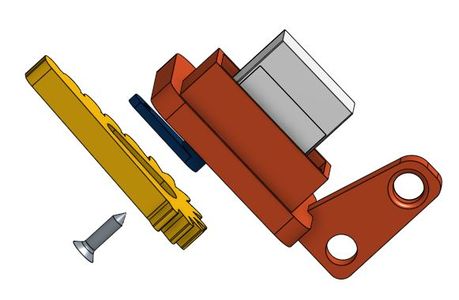
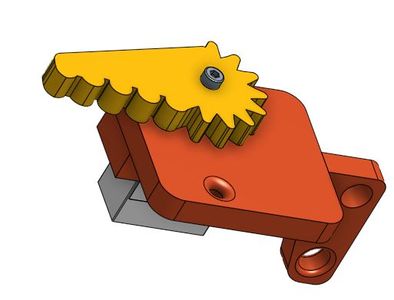
Build the Claw
There are two toothed claw jaw parts. One of them has a single-arm servo horn recess and the other has a round hole for a nylon spacer. Put the one with the servo horn recess onto the SG90 servo first, along with the single-arm horn. Secure with an SG90 servo screw which came with the SG90 servo, the pointed screw in the same bag with the servo horn.
Next, place a washer on one of the screws and then place a nylon spacer on the screw, then insert this structure into the claw jaw that has the round hole as shown in the diagram below. Carefully turn the servo mounted jaw so that the teeth match up as shown in the diagram before tightening the screw that has the nylon spacer.
Be sure the servo horn was inserted in the correct orientation previously while the arm was under power in STAND mode. Use the pointed screw that was in the servo bag for the SG90 servo to secure the servo claw and single-arm servo horn to the SG90.
Flip the claw assembly over so you can install the free turning claw.
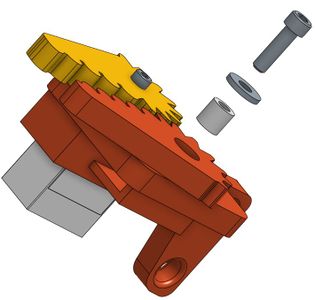
Use a #6 screw, washer, and nylon spacer to secure the free turning claw to the claw assembly.
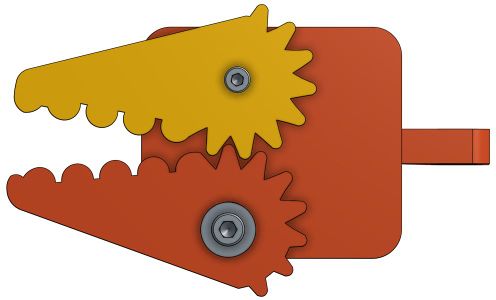
Top view of completed claw assembly. Note how the teeth of the two claws mesh together, you need to replicate this exact tooth pattern or the claw won't work properly.




Build the Arm
The arm has two components: the Claw Arm on which the claw structure will be mounted, and the Claw Arm Guide which is just a bar that helps keep the claw approximately level as it raises and lowers.
Follow the illustrations below to assemble each piece of the Arm.
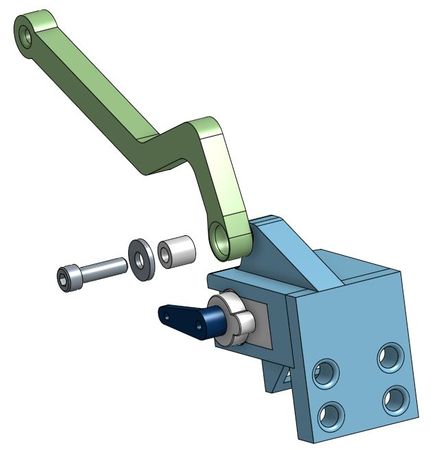
Using a #6 screw, washer, and nylon spacer, attach the Claw Arm Guide to the Grip Base.
The Claw Arm (blue) needs to be worked over the servo horn and the nub on the other side of the servo horn. It may take a little wiggling to get it seated. Secure the Claw Arm using an M2.5 screw through it and the servo horn (screw not shown in this diagram).
On the other side of the Claw Arm, a nylon spacer goes in the bottom hole of the Claw Assembly, then the "forked" side of the Claw Arm is pushed over the hole containing the nylon spacer. It make take some wiggling and working to get it on. The Claw Arm Guide is attached to the top hole of the Claw Arm Assembly using a #6 screw, washer, and nylon spacer as shown.



NOTES:
- The Claw Assembly can be installed either with the claws on the bottom or on the top. The diagrams show bottom installation. This allows you to get closer to the ground, about one inch, to pick items up. The top installation option would allow you to reach slightly higher.
- Make sure you put a nylon spacer inside the large hole in the claw assembly that gets surrounded on both sides by the forked section of the Claw Arm.
Secure the Wires
The Claw Arm plastic part has a channel running down along much of its length. Thread the SG90 wire through this channel, this will keep it organized and prevent it from getting snagged.
There is also a wire guide on the Grip Base plastic part, you can optionally run both servo wires through this to keep them secure and guide them nearer into the accessory port.
Mount the Arm on the Hexapod
The four holes in the Grip Base part simply slide over the four screws coming out of the accessory port. Secure with one or two wingnuts. Plug the servo wires into the labelled servo extension wires which should still be sticking out of the accessory port hole. Shove any excess wire back into the accessory port hole.
Test The Grip Arm
To test the grip arm, follow these steps:
- Everything starts powered off.
- Turn the robot dial to RC.
- Power on the robot and the gamepad.
- After the robot boots (a few seconds) turn the dial counterclockwise slowly until you hear a beep. Go a tad farther then stop turning. The dial should be between "DEMO" and "RC." This is a special mode that puts the robot into "Radio control mode with grip arm."
- In this mode, F2 (which is normally one of the fight modes) will allow control of the grip arm. Press on F2.
- Now the DPAD buttons should control the grip arm as described in the earlier section on this article Controlling the Grip Arm.
If it doesn't work, here are some common issues:
- Neither claw works: you may not have flashed the latest robot code onto the robot.
- One or the other works but not both: A wire may not be connected properly, check wiring.
License
The Hexapod Grip Arm is licensed under the Creative Commons Attribution-ShareAlike International 4.0 license.